GPS数据处理
在sensorBridge中,处理GPS数据的函数为HandleNavSatFixMessage。
如果雷达的数据不是STATUS_NO_FIX,则就直接返回不处理
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
|
void SensorBridge::HandleNavSatFixMessage(
const std::string& sensor_id, const sensor_msgs::NavSatFix::ConstPtr& msg) {
const carto::common::Time time = FromRos(msg->header.stamp);
if (msg->status.status == sensor_msgs::NavSatStatus::STATUS_NO_FIX) {
trajectory_builder_->AddSensorData(
sensor_id,
carto::sensor::FixedFramePoseData{time, absl::optional<Rigid3d>()});
return;
}
if (!ecef_to_local_frame_.has_value()) {
ecef_to_local_frame_ =
ComputeLocalFrameFromLatLong(msg->latitude, msg->longitude);
LOG(INFO) << "Using NavSatFix. Setting ecef_to_local_frame with lat = "
<< msg->latitude << ", long = " << msg->longitude << ".";
}
trajectory_builder_->AddSensorData(
sensor_id, carto::sensor::FixedFramePoseData{
time, absl::optional<Rigid3d>(Rigid3d::Translation(
ecef_to_local_frame_.value() *
LatLongAltToEcef(msg->latitude, msg->longitude,
msg->altitude)))});
}
|
如果是第一帧雷达数据,则计算一个ecef原点到局部坐标系的坐标变换。
在之后的GPS数据中,可以使用此坐标变换来获得GPS数据间的相对坐标变换
ecef 坐标系

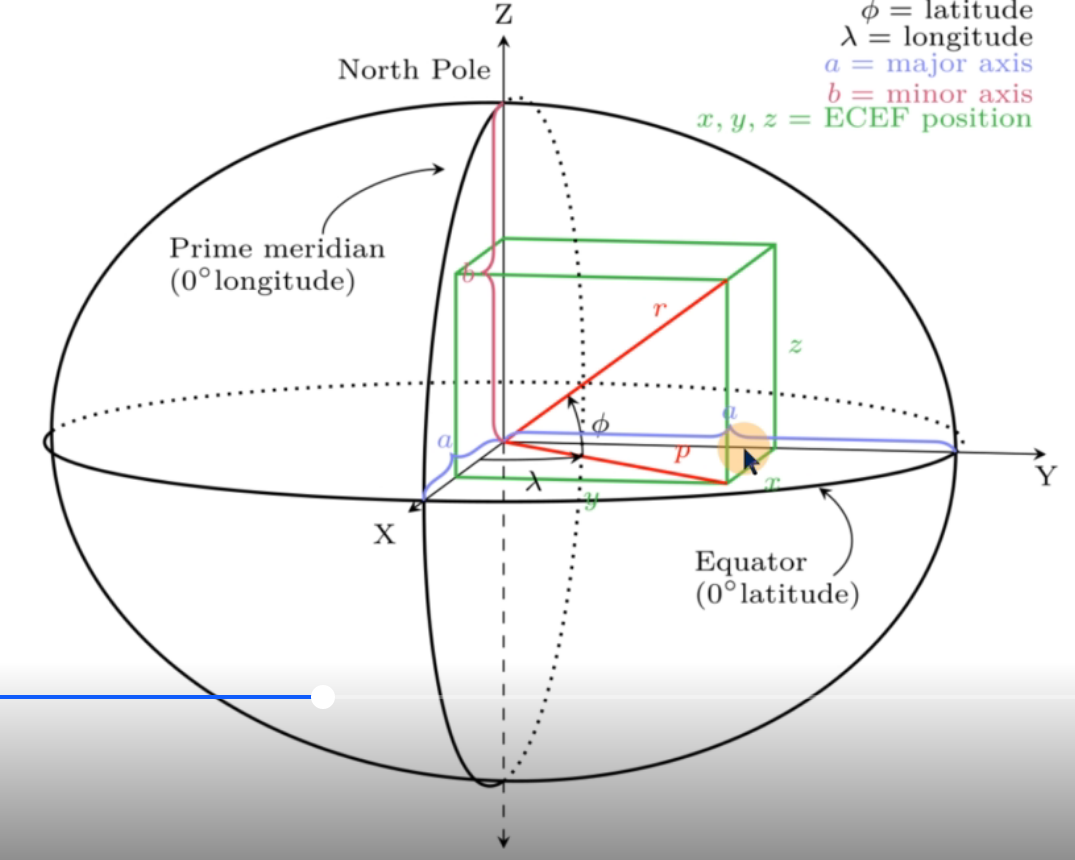
这里的显示x,y, z就是ecef坐标系的一个示例
