在cartographer中,有两种雷达的消息格式,一个是LaserScan,另外一个是MultiEchoLaserScan,即多回声波雷达。
雷达消息处理流程
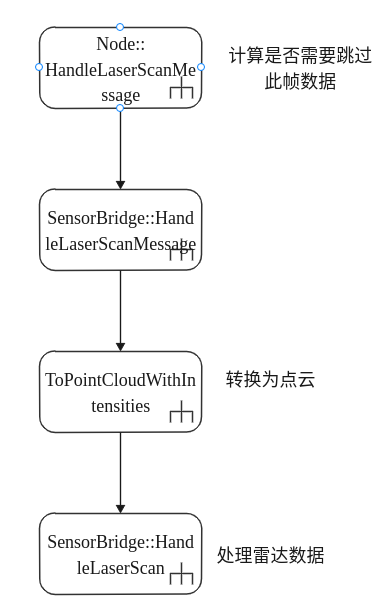
下面是cartographer在接收到雷达消息的之后的流程示意图

node类筛选数据
在Node类中,会定义订阅者Node::HandleLaserScanMessage来处理雷达消息的处理,通过配置文件里配置的采样频率,来判定此帧数据要不要处理,不要处理的直接的return
1
2
3
4
5
6
7
8
9
10
| void Node::HandleMultiEchoLaserScanMessage(
const int trajectory_id, const std::string& sensor_id,
const sensor_msgs::MultiEchoLaserScan::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).rangefinder_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandleMultiEchoLaserScanMessage(sensor_id, msg);
}
|
1
2
3
4
5
6
7
8
9
10
11
| void Node::HandleLaserScanMessage(const int trajectory_id,
const std::string& sensor_id,
const sensor_msgs::LaserScan::ConstPtr& msg) {
absl::MutexLock lock(&mutex_);
if (!sensor_samplers_.at(trajectory_id).rangefinder_sampler.Pulse()) {
return;
}
map_builder_bridge_.sensor_bridge(trajectory_id)
->HandleLaserScanMessage(sensor_id, msg);
}
|
sensor类处理
如果需要处理,则通过map_builder_bridge来获取对应轨迹ID的sensor_bridge,通过sensor_bridge来处理
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| void SensorBridge::HandleLaserScanMessage(
const std::string& sensor_id, const sensor_msgs::LaserScan::ConstPtr& msg) {
carto::sensor::PointCloudWithIntensities point_cloud;
carto::common::Time time;
std::tie(point_cloud, time) = ToPointCloudWithIntensities(*msg);
HandleLaserScan(sensor_id, time, msg->header.frame_id, point_cloud);
}
void SensorBridge::HandleMultiEchoLaserScanMessage(
const std::string& sensor_id,
const sensor_msgs::MultiEchoLaserScan::ConstPtr& msg) {
carto::sensor::PointCloudWithIntensities point_cloud;
carto::common::Time time;
std::tie(point_cloud, time) = ToPointCloudWithIntensities(*msg);
HandleLaserScan(sensor_id, time, msg->header.frame_id, point_cloud);
}
|
无论是LaserScan还是MultiEchoLaserScan,都是通过函数ToPointCloudWithIntensities将ros的消息转换为点云
将生成的点云,再通过HandleLaserScan一样处理。因此,下面我们着重看一下如何把msg转换为点云
点云的转换
无论是普通的雷达还是多回声波雷达,都是通过函数ToPointCloudWithIntensities把他们转为点云的数据,下面查看此函数的定义,在msg_conversion中,有此函数的重载
1
2
3
4
5
6
7
8
9
10
11
12
13
|
std::tuple<::cartographer::sensor::PointCloudWithIntensities,
::cartographer::common::Time>
ToPointCloudWithIntensities(const sensor_msgs::LaserScan& msg) {
return LaserScanToPointCloudWithIntensities(msg);
}
std::tuple<::cartographer::sensor::PointCloudWithIntensities,
::cartographer::common::Time>
ToPointCloudWithIntensities(const sensor_msgs::MultiEchoLaserScan& msg) {
return LaserScanToPointCloudWithIntensities(msg);
}
|
因此,在调用的时候会自动识别传入参数的类别进行不同函数的加载。但是对于函数LaserScanToPointCloudWithIntensities 并没有进行重载,而是通过一个模板类对代码进行了缩减。
数据类型
在说明代码之前,我们需要对两种数据结构做一下强调
LaserScan
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| $ rosmsg show sensor_msgs/LaserScan
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
|
MultiEchoLaserScan
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| $ rosmsg show sensor_msgs/MultiEchoLaserScan
std_msgs/Header header
uint32 seq
time stamp
string frame_id
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
sensor_msgs/LaserEcho[] ranges
float32[] echoes
sensor_msgs/LaserEcho[] intensities
float32[] echoes
|
这两种数据结构非常相似,除了ranges和intensitites的定义不同,一个是简单的float32的数组,一个是数组里面套一个数组。在处理的时候只需要注意这两个不同即可
PointCloudWithIntensities
这是返回的点云数据类型
1
2
3
4
5
6
7
8
9
10
11
| struct TimedRangefinderPoint {
Eigen::Vector3f position;
float time;
};
using TimedPointCloud = std::vector<TimedRangefinderPoint>;
struct PointCloudWithIntensities {
TimedPointCloud points;
std::vector<float> intensities;
};
|
此点云数据由两个vector组成,
其中一个vector的元素由位置和时间组成
其中一个vector的元素由强度组成
代码解析
下面为此函数的全部内容
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
|
template <typename LaserMessageType>
std::tuple<PointCloudWithIntensities, ::cartographer::common::Time>
LaserScanToPointCloudWithIntensities(const LaserMessageType& msg) {
CHECK_GE(msg.range_min, 0.f);
CHECK_GE(msg.range_max, msg.range_min);
if (msg.angle_increment > 0.f) {
CHECK_GT(msg.angle_max, msg.angle_min);
} else {
CHECK_GT(msg.angle_min, msg.angle_max);
}
PointCloudWithIntensities point_cloud;
float angle = msg.angle_min;
for (size_t i = 0; i < msg.ranges.size(); ++i) {
const auto& echoes = msg.ranges[i];
if (HasEcho(echoes)) {
const float first_echo = GetFirstEcho(echoes);
if (msg.range_min <= first_echo && first_echo <= msg.range_max) {
const Eigen::AngleAxisf rotation(angle, Eigen::Vector3f::UnitZ());
const cartographer::sensor::TimedRangefinderPoint point{
rotation * (first_echo * Eigen::Vector3f::UnitX()),
i * msg.time_increment};
point_cloud.points.push_back(point);
if (msg.intensities.size() > 0) {
CHECK_EQ(msg.intensities.size(), msg.ranges.size());
const auto& echo_intensities = msg.intensities[i];
CHECK(HasEcho(echo_intensities));
point_cloud.intensities.push_back(GetFirstEcho(echo_intensities));
} else {
point_cloud.intensities.push_back(0.f);
}
}
}
angle += msg.angle_increment;
}
::cartographer::common::Time timestamp = FromRos(msg.header.stamp);
if (!point_cloud.points.empty()) {
const double duration = point_cloud.points.back().time;
timestamp += cartographer::common::FromSeconds(duration);
for (auto& point : point_cloud.points) {
point.time -= duration;
}
}
return std::make_tuple(point_cloud, timestamp);
}
|
函数首先对数据的合规性进行了检查
1
2
3
4
5
6
7
| CHECK_GE(msg.range_min, 0.f);
CHECK_GE(msg.range_max, msg.range_min);
if (msg.angle_increment > 0.f) 转{
CHECK_GT(msg.angle_max, msg.angle_min);
} else {
CHECK_GT(msg.angle_min, msg.angle_max);
}
|
定义了需要返回的点云point_cloud,然后对雷达的每一点进行处理
1
2
3
4
5
| PointCloudWithIntensities point_cloud;
float angle = msg.angle_min;
for (size_t i = 0; i < msg.ranges.size(); ++i) {
...
}
|
检查第一个点的数据是否存在
1
2
3
4
5
|
const auto& echoes = msg.ranges[i];
if (HasEcho(echoes)) {
...
}
|
这里通过简单的重载即可实现
- 如果是echoes是一个数值,直接返回true
- 如果是echoes是sensor_msgs::LaserEcho,则检查是他是不是空的
1
2
3
4
5
6
| bool HasEcho(float) { return true; }
bool HasEcho(const sensor_msgs::LaserEcho& echo) {
return !echo.echoes.empty();
}
|
下面对返回数据的第一个属性进行填充,即points,他是一个TimedRangefinderPoint为元素的一个vector
1
2
3
4
5
6
7
8
9
10
11
| const float first_echo = GetFirstEcho(echoes);
if (msg.range_min <= first_echo && first_echo <= msg.range_max) {
const Eigen::AngleAxisf rotation(angle, Eigen::Vector3f::UnitZ());
const cartographer::sensor::TimedRangefinderPoint point{
rotation * (first_echo * Eigen::Vector3f::UnitX()),
i * angle.time_increment};
point_cloud.points.push_back(point);
...
}
|
在这里,我们把点云重新定义到了一个新的坐标系,保持各个点的相对距离和原来雷达的点一致
每一个点都以$(1,0,0)$为基准,乘以此点的距离first_echo,若rotation为正,则逆时针 旋转,若rotation为负,则 顺时针旋转,循环遍历每一个点,则可以获得一个点云
添加强度信息,如果没有则赋予0
1
2
3
4
5
6
7
8
9
| if (msg.intensities.size() > 0) {
CHECK_EQ(msg.intensities.size(), msg.ranges.size());
const auto& echo_intensities = msg.intensities[i];
CHECK(HasEcho(echo_intensities));
point_cloud.intensities.push_back(GetFirstEcho(echo_intensities));
} else {
point_cloud.intensities.push_back(0.f);
}
|
最后更新一下角度,即此帧的下一个雷达点
1
| angle += msg.angle_increment;
|
继续重新获取雷达点的距离,开始转换等
最后是时间的处理
1
2
3
4
5
6
7
8
9
10
11
| ::cartographer::common::Time timestamp = FromRos(msg.header.stamp);
if (!point_cloud.points.empty()) {
const double duration = point_cloud.points.back().time;
timestamp += cartographer::common::FromSeconds(duration);
for (auto& point : point_cloud.points) {
point.time -= duration;
}
}
|
在往point_cloud里面添加point的时候,我们就是按照time_increment一个个增加上去的,因此取的最后一个点,也就可以得到此帧数据扫描所需要的时间,就是duration。
timestamp本来是此帧数据的第一个点发射的时间,现在加上了duration,就是最后一个点发射出去的时间,也作为此函数的返回数据
最后把此帧点云所有的点的时间减去了duration,即最后一个点为0,第一个点为-duration。
最后返回数据
1
| return std::make_tuple(point_cloud, timestamp);
|
