如何把单线雷达转为点云

数据格式
在ROS中,单线激光雷达的数据格式为sensor_msgs/LaserScan,具体如下
1 | std_msgs/Header header |
注意,这里只有ranges,即激光点距离自身的距离信息,我们的目的是要将其转为点云,即$(x,y,z)$
计算图解
一般而言,激光的范围都是一圈的,从ranges的第一个激光点,角度为angle_min,到 ranges的最后一个激光点,角度为angle_max。


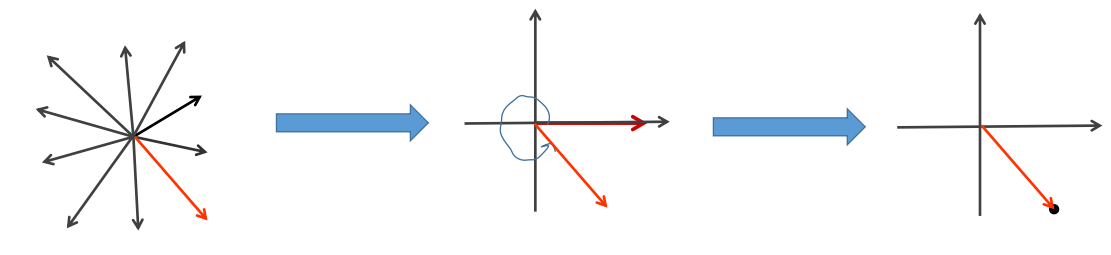
假设上图左边即为激光点打出的形式,右边是点云的一个形式。为了清晰起见,图中的激光点很稀疏,angle_increment非常大。
我们选取ranges中的第一个点,对应的角度为angle_min,即为如下红色的激光点,为了将其转为点云,我们做如下处理
- 第一步,取同等长度的激光点,放到x轴处,,记录坐标点为(ranges[0], 0)
- 第二步,逆时针旋转angle = angle_min度(angle记录的就是逆时针旋转度数),即可得到对应点坐标


第三步,更新angle = angle + angle_increment,获取下一个激光点的角度
重复前三步,直至全部转换完成
下图完成了第二个点的转换

一直重复即可完成转换
Comments