LIOSAM相对于LOAM和Lego-LOAm的代码可读性比较好,功能也比较全。可以方便的去拓展
摘要
我们提出了一个基于GTSAM优化库的 紧耦合的雷达惯性里程计。它是一个高精度,实时的轨迹估计和地图构建。LIOSAM有多个传感器,他基于因子图,把我们相对观测(两帧之间的观测)和绝对观测(GPS),包括回环的结果,都作为一个因子,统一到框架中去。
IMU可以做运动补偿(点云畸变),也可以为雷达odometry提供一个比较好的初值。获得的雷达里程计反过来会估计IMU的零偏,这就是紧耦合的表现。、
为了保证实时的同时保证好的表现,在后端优化中,我们没有拿当前帧和整个地图匹配,而是边缘化了老的帧。这样的Scan匹配(没有和全局的匹配而是和部分的匹配)很好的提升了实时的性能。
作者在船上(大场景),手持(小场景)和小车上(中场景)都得到了不错的效果
介绍
LOAM的局限性:它的地图保存为全局体素地图,难以实现闭环检测并且难以和其他的绝对观测(例如GPS)配合。 大场景下会有一些累积漂移
本文提出的可以很好的解决上述的问题。
步骤
- 利用IMU的数据做了点云的运动补偿
- 运动补偿后,估计的运动可以提供一个比较好的初值
- 得到的里程计反过来校准imu的零偏
- 在全局的因子图中,有效的实现了传感器融合,利用雷达和IMU的数据,还可以使用GPS和指南针的朝向
- 从不同的传感器之间的因子,放入因子图,实现一个联合的优化,得到一个最佳的估计状态
- 滑窗思想:巴拉巴拉
重要的贡献
- 提供了紧耦合的惯性里程计的优化
- 局部滑窗的思想,保证雷达的配准,保证实时性和性能
- 此框架是有广泛的验证的,不同的场景下,不同的平台和环境下都做了大量的实验,都比较优秀
EKF是一个松耦合融合方法
纯滤波的方式不好加入回环
LIO-Mapping: 实时性不好,跑的有点慢
算法介绍
总览
$W:$世界坐标系
$B$:机器人坐标系,以及IMU坐标系。这样的做法(他俩都是B坐标系)在紧耦合里面是比较常见的
机器人的状态由下面经典的15个状态量来表示
其中,R是旋转矩阵$SO(3)$,p表示位置,v表示速度,b是IMU零漂。变换from B to W 可以表示为$T=[R;p]$
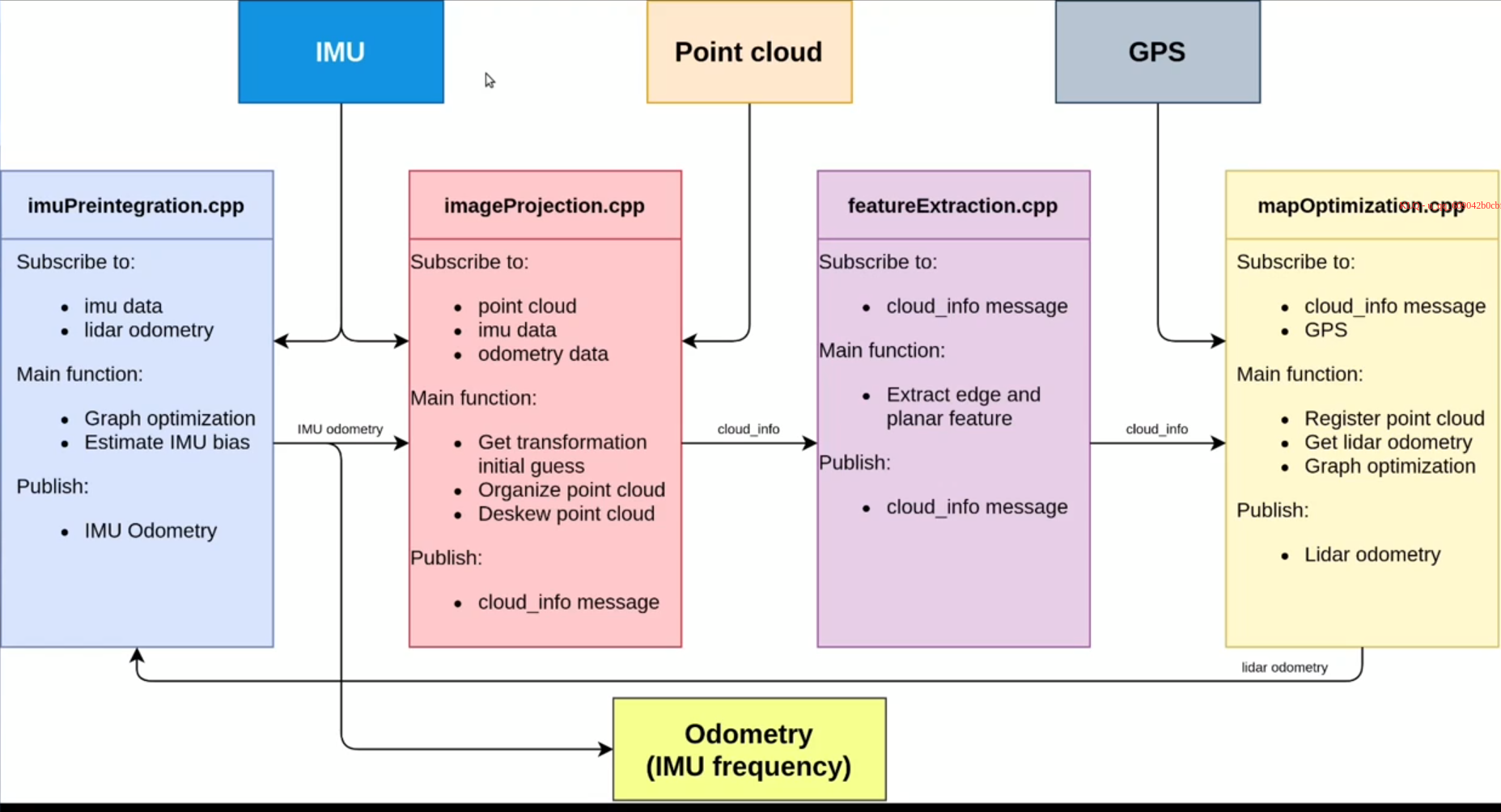
下面的总览图表示算法的总体过程。系统接受的数据有
3D雷达
IMU
可选gps
使用传感器的观测来估计当前机器人的位姿,可以容易的建模为最大后验的问题。我们利用因子图对其建模,效果好于贝叶斯网络,这里有一个假设,所有的传感器的噪声都是符合高斯分布的。然后就可以把他作为一个最小二乘法来计算
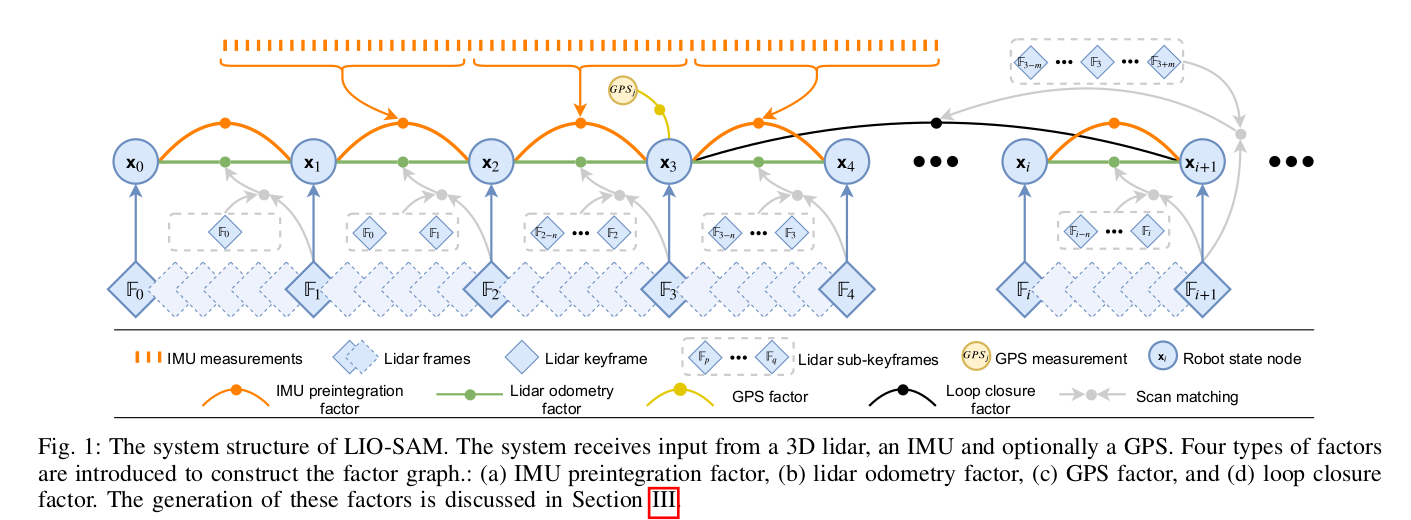

我们引入了四种不同类型的因子,同时还有一个待优化的变量。这里就是机器人的状态量$(1)$,包括速度和位置等。这四个factor为
- IMU preintegration factors
- lidar odometry factors
- GPS factors
- loop closure factors
注意不是所有的观测都是关键帧,只有是关键帧的时候才会被加入到因子图中,因此当 当前帧被判定为一个关键帧的时候,它就会作为一个新的状态量$x$加入到因子图中。一旦因子图发生了变化,我们就可以使用增量的ISAM2的一个方式去优化,具体是通过GTSAM来优化的
IMU 预积分因子
IMU可以测量的两个量,加速度和角速度分别是由如下式子计算出来的


其中 $b_t^w$和 $b_t^a$是零偏, $n_t^a$和$n_t^w$表示噪声。$R_t^{BW}$表示从W到B的变换,即把world的加速度转移到自己的身上。下面我们用上面的结果可以对运动做出估计
在$t+\Delta t$时刻,它的三个状态量为
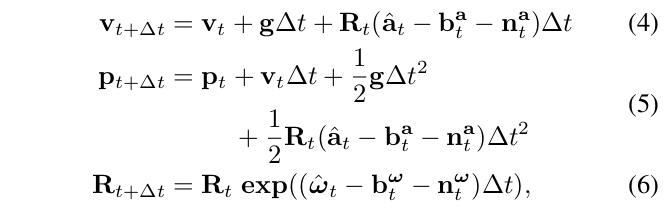

下面使用IMU预积分方法来获得相对的运动,相对的状态量结果为


IMU预积分会提供两帧之间的运动关系
Lidar Odometry 因子
和LOAM类似
GPS
GPS不是频繁添加的,只有置信度的时候,才会加入
回环检测
回环检测 用于 高度累积的漂移是很不错的。 GPS的高度信息不太好,实际只用x和y
对比LOAM,清晰度更高