
消息回调接受数据
经过sample过滤
转换为点云,形式
点云最后一个点的时间为0,以此往前是负数,每一个点云还配有一个time。用于记录最后一个点的时间戳
将雷达转换为几段,处理每一段雷达的时间,要求最后一个点的时间为0,并且存好相应的时间。通常为1段
把点云坐标转换到tracking_frame下, 并记录在tracking下,原来的点云位置,作为原点,记录点云
1
2
3
4
5
6
7struct TimedPointCloudData {
common::Time time; // 点云最后一个点的时间
Eigen::Vector3f origin; // 以tracking_frame_到雷达坐标系的坐标变换为原点
TimedPointCloud ranges; // 数据点的集合, 每个数据点包含xyz与time, time是负的
// 'intensities' has to be same size as 'ranges', or empty.
std::vector<float> intensities; // 空的
};加入数据分发器中,准备数据分发
数据分发:找到时间time最早的队列中的数据,pop数据。传入各个回调函数
传入函数CollatedTrajectoryBuilder::HandleCollatedSensorData,即就是回调函数
进入全局轨迹建立器,globaltrajectoryBuilder,往里面添加数据并处理
多雷达点云同步,根据start和end点,重新生成一个点云,新点云的数据格式
合并步骤:
- 把点云添加到时间同步的map中
- 找start, end=min(最近雷达1数据,最近雷达2数据)
- 合并start到end的雷达数据,生成新点云,注意按照时间排序,返回
- 第二次处理数据,若时间同步的map中有之前相应key数据没有处理完,首先处理。start=end,end=点云最后一个点的时间戳
1 | struct TimedPointCloudOriginData { |
点云的运动畸变去除,根据位姿估计器估计每一个点的位姿,把每一个点从tracking frame变换到local slam坐标系下,并将转换成功的点云放入accumulated_range_data_中,它的数据结构为
1
2
3
4
5struct RangeData {
Eigen::Vector3f origin;
PointCloud returns;
PointCloud misses; // 都是local坐标系下的坐标
};
点云坐标转换到local坐标系下,并且做体素滤波,and裁剪z轴data_
扫描匹配
time时刻位姿预测
粗匹配,相关性扫描匹配
ceres 进行精匹配,把在栅格上的像素精度提升到物理精度上
把该位姿下的点云插入子图中
返回数据,数据格式内容
1
2
3
4insertion_submaps struct InsertionResult {
std::shared_ptr<const TrajectoryNode::Data> constant_data;
std::vector<std::shared_ptr<const Submap2D>> insertion_submaps; // 最多只有2个子图的指针
};其中,constant_data的数据内容为 时间戳,重力对齐方向的变换,体素滤波过后的点云和local slam下的位姿
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19struct Data {
common::Time time;
// Transform to approximately gravity align the tracking frame as
// determined by local SLAM.
Eigen::Quaterniond gravity_alignment;
// Used for loop closure in 2D: voxel filtered returns in the
// 'gravity_alignment' frame.
sensor::PointCloud filtered_gravity_aligned_point_cloud;
// Used for loop closure in 3D.
sensor::PointCloud high_resolution_point_cloud;
sensor::PointCloud low_resolution_point_cloud;
Eigen::VectorXf rotational_scan_matcher_histogram;
// The node pose in the local SLAM frame.
transform::Rigid3d local_pose;
};最后返回MatchResult, 额外包含一项匹配后的点云
1
2
3return absl::make_unique<MatchingResult>(
MatchingResult{time, pose_estimate, std::move(range_data_in_local),
std::move(insertion_result)});
LocalTrajectoryBuilder扫描匹配完毕, 然后将扫描匹配的结果当做节点插入到后端的位姿图中
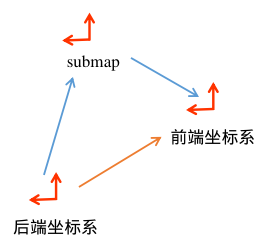
GetLocalToGlobalTransform:第一次进入。返回0变换。
之后通过如下图计算相对变换。
- submap在后端的变换在:data_.global_submap_pose_2d
- submap在前端的变换在:data_.submap_data.at(submapid).submap

添加后端节点以及添加后端的子图,计算约束
- 把插入的子图的global pose加入到优化问题(optimization_problem_)中
- 把节点加入到优化问题中
- 计算子图内约束
- 子图内约束
- 子图间约束
构建残差
- 五种残差
后端:
所有的submap数据都保存在data_.submap中
所有的node数据也保存在data_.node中
总结的问题:
- submap只有在前端生成,后端是不会对其更改的。万一机器人走太快了,submap生成的墙有两条线,ceres又不会优化
- 位姿估计器的不太准,ceres优化还当做优化变量,所以不好